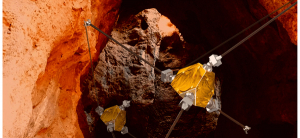
With support from NASA, a research team at Stanford University has developed a mini robot called “ReachBot” to explore lava tubes on Mars. This robot can move freely by clinging to the uneven surface of the cave using its extendable legs. /Stanford University
Robotics engineers use robots to explore and study challenging environments that are difficult for humans to access. Additionally, when designing robots suited to each environment, we draw much inspiration from living creatures in the natural world, including insects, reptiles, fish and mammals. “ReachBot”, developed by a research group at Stanford University, was also developed in this way. The stage of activity of this robot, which imitates a spider, is a cave on an alien planet.
Stanford University in the United States announced that the team from Professor Marco Pavone’s Biomimicry Laboratory at the Department of Aeronautics and Astronautics recently developed the Mars exploration robot “Richbot” and published its results in the journal international academic “Science Robotics”. Richbot, developed with support from the National Aeronautics and Space Administration (NASA), is a mini robot dedicated to exploring caves on Mars that imitates the “Harvestman spider”, which has abnormally long legs.
According to the research team, there are numerous vertical caves on Mars created by past volcanic activity. There are about 1,000 that NASA has officially confirmed. However, his true nature was never revealed to the public. This is because it is difficult to even approach the vertical cave, let alone look inside it, with the existing exploration rover, which is large and boring and cannot adequately pass over small rocks or shallow sand dunes.
The toaster-sized Richbot borrowed the spider’s ability to move freely even in dark caves to turn this impossible into the possible. The key is the four legs that extend lengthwise like a boom microphone. The name Richbot also comes from the long reach of its legs. “At the end of each leg is an 80×63×36 mm electric gripper with three fingers,” said Stephanie Newdick, a doctoral candidate in the research team. “Stable movement is possible by moving alternately,” she explained.
“Richbot” captures information about the cave surface in units of 1 to 2 mm using a high-resolution camera and lidar sensor, then the AI analyzes the information to determine the position, length and tension of the legs and continues its own . /Stanford University
Richbot also has autonomous movement features. Artificial intelligence (AI) analyzes the information acquired by the high-resolution camera and Lidar sensor integrated into the body and recognizes the shape of the surface in units of 1 to 2 mm, then determines which point to hold on to and which length and tension each leg is. You can move while you decide for yourself whether to keep it or not. In the case of the energy necessary for driving, the project of providing the energy of a rover to miniaturize it, which is essential for speleological exploration, is being studied. The rover moves to the cave entrance and lowers the Richbot, which is connected by cables, into the cave.
Richbot demonstrated its capabilities through a recent field demonstration conducted in a lava tube in California’s Mojave Desert. Although the demonstration was conducted with one leg rather than the full body, she received a passing grade in terms of recognizing the terrain and having a firm grip on the gripper as it grips the surface.
As a result, the research team believes that Richbot can be a form factor that can bridge the gap between existing exploration robots, which are polarized into large and small. Professor Pavone said: “Large robots have a long operating time, but have limitations in exploring narrow or complex terrain, while small robots are just the opposite.” He added: “Richbot has almost no restrictions on the exploration terrain and has a long operating period using external energy. “It has the best of both worlds,” he said.
NASA’s goal is to upgrade Richbot and deploy it to Mars. At this time, you may witness a historic day where you encounter the alien life form you have been searching for. This is because astrobiologists choose lava tubes as the number one location where past or currently surviving Martian microorganisms will be discovered.
In this article, the research team also pointed out that Earth’s microorganisms thrive even in deep lava tubes that do not receive a single gram of light, and it is highly likely that conditions such as liquid water, atmosphere and climate were similar to those on Earth when lava tubes formed on Mars. This suggests the possibility that microorganisms live in deep caves that are unaffected by extreme changes in temperature. Even if he fails to find life, Richbot’s challenge could lead to revolutionary advances in understanding Mars more accurately from a geological perspective.
Professor Pavone said: “20 years ago, humanity’s goal was to land a robot on Mars, but thanks to the advancement of science and technology, we are now sending Richbot to explore the subsurface of Mars,” adding : “We’re going to see places that have never been seen before.” “If you can see it, you can learn more,” he said.
“Richbot” received a passing score in a field test conducted in a lava cave in the Mojave Desert to test terrain recognition, accurate leg positioning and gripper grip strength. /Stanford University
#Stretch #robots #legs…Richbot #spider #robot #searching #life #caves #Mars